产品中心

| 以高速性能为骄傲,大幅度地提高生产力。修长的手臂可动范围宽广,可对应不同的布局。 最大工作范围 :710・ 905mm 最大可搬运质量 :7kg 标准循环时间 :0.31・ 0.34秒 重复定位精度 :±0.02・ 0.03mm |
 |
规格
| 项 目 | 规 格 | ||
| 机器人名称 | VS-068 | VS-087 | |
| 轴数 | 6 | ||
| 位置检测方式 | 绝对编码器 | ||
| 驱动电机/制动器 | 全轴AC伺服电机/全轴带制动器 | ||
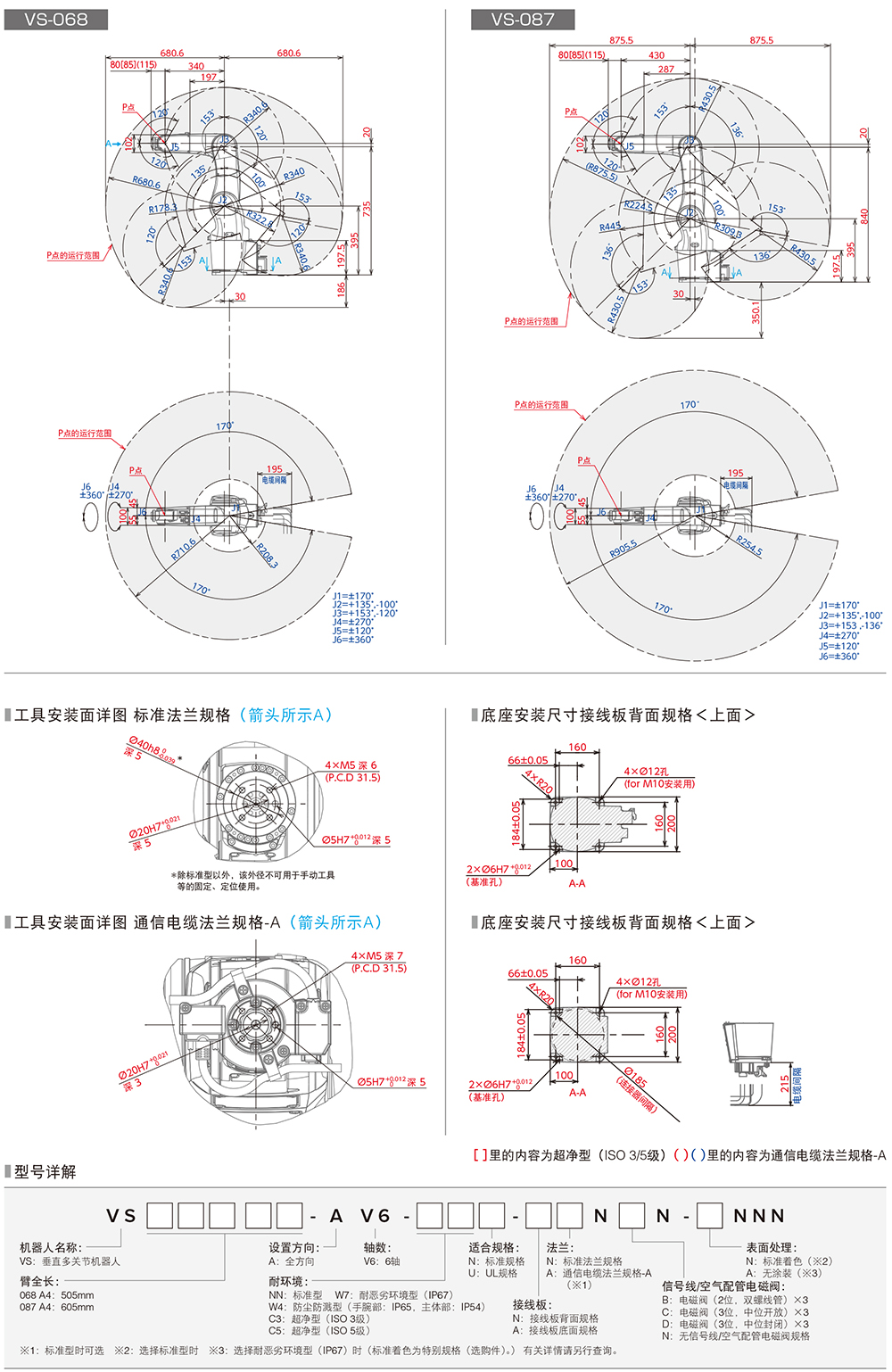
| 臂全长(第1臂+第2臂) | 680(340+340)mm | 875(445+430)mm | |
| 最大运行区域(P点) | 710mm | 905mm | |
| 运行角度 | J1(第1轴) | ±170°(*4) | |
| J2(第2轴) | +135°, −100° | ||
| J3(第3轴) | +153°, −120° | +153°, −136° | |
| J4(第4轴) | ±270° | ||
| J5(第5轴) | ±120° | ||
| J6(第6轴) | ±360° | ||
| 最大可搬运质量 | 7kg | ||
| 速度 | J1 | 356.25deg/sec | 285deg/sec |
| J2 | 303deg/sec | 252.5deg/sec | |
| J3 | 378.75deg/sec | 303deg/sec | |
| J4 | 475deg/sec | 378.75deg/sec | |
| J5 | 475deg/sec | 378.75deg/sec | |
| J6 | 760deg/sec | 606deg/sec | |
| 标准循环时间(*1) | 0.31sec | 0.34sec | |
| 重复定位精度(工具安装面中心)(*2) | ±0.02mm | ±0.03mm | |
| 最大容许惯性力矩(惯性) | J4,J5 | 0.45kgm2 | |
| J6 | 0.1kgm2 | ||
| 最大容许力矩 | J4,J5 | 16.2Nm | |
| J6 | 6.86Nm | ||
| 信号线/空气配管电磁阀(选购件) | 信号线 | 10芯(接近传感器等的信号线)(*5,6) | |
| 空气配管电磁阀(*3) | 7系统(φ4×6, φ6×1) [可在以下1~3中选择] 1.电磁阀(2位,双螺线管)×1 3.电磁阀(3位,中位封闭)×3 |
||
| 通信电缆法兰规格-A(选购件) | 17芯(相机等的电源线)(*6) | ||
| LAN×1(1000BASE-T) (*7) | |||
| 空气源 | 常用压力 | 0.20~0.39MPa | |
| 最大容许压力 | 0.49MPa | ||
| 空气传播噪音(A加权当量连续音压级) | 65dB以下 | ||
| 保护等级 | 耐恶劣环境型:IP67(*9)(选购件) 防尘防溅型:手腕部 IP65 / 主体部 IP54(选购件) 超净型:ISO 3/5级(选购件) |
||
| 质量 | 约49kg | 约51kg | |
*1:负载1kg时,用机器人将物体举起至25mm的高处,在相距300mm的两点间往返所需的时间。
*2:重复定位精度是周围环境温度恒定时的精度。
*3:只有φ4×6可用内置电磁阀控制。
*4:壁挂型设置时对运行角度有限制。有关详情请另行查询。
*5:与通信电缆法兰规格-A同时选择时,本线(接近传感器等的信号线)为4芯。
*6:容许电流有限制。
*7:与接线板连接的LAN电缆不能超过20m。
*8:保持机器人内部的气压,维持保护等级IP67。请使用空气净化单元。此外,请不要使其在水中运行。
外形尺寸与运行范围 单位:mm