产品中心

| 项 目 | 规 格 | |||
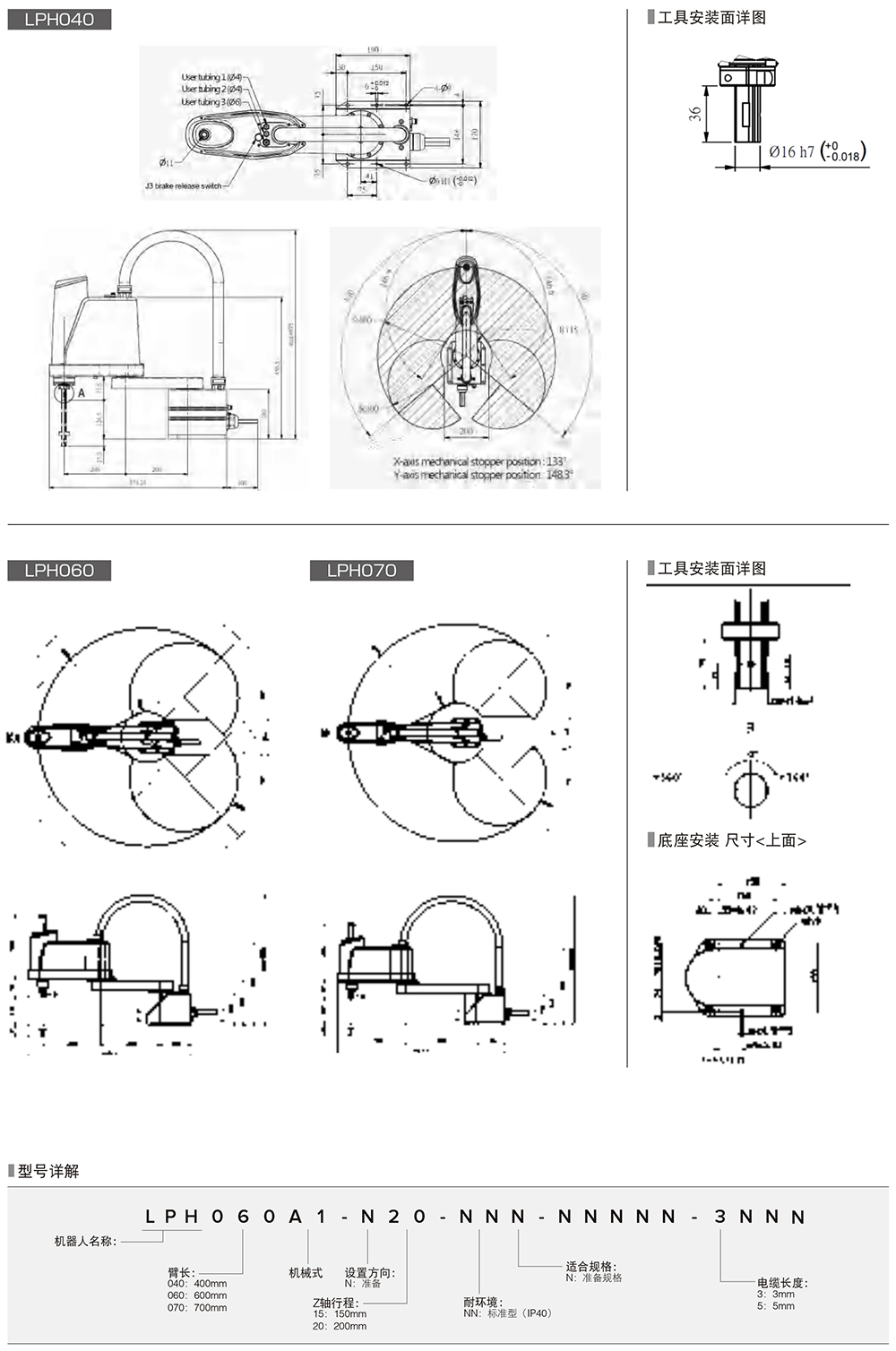
| 机器人(*1) | LPH-040A1 | LPH-060A1 | LPH-070A1 | |
| 臂全长(第1臂+第2臂) | 200+200=400mm | 300+300=600mm | 300+400=700mm | |
| 运行角度、行程及电机容量 | J1(第1轴) | ±130° | ±133° | |
| J2(第2轴) | ±146.6° | ±153° | ||
| Z(第3轴) | 150mm | 200mm | ||
| T(第4轴) | ±360° | |||
| 轴组合 | J1(第1轴)+J2(第2轴)+Z(第3轴)+T(第4轴) | |||
| 最大可搬运质量 | 3kg | 6kg | ||
| 标准循环时间(负载1kg/负载2kg)(*2) | 0.45sec | 0.39 / 0.42sec | 0.40 / 0.43sec | |
| 最大合成速度 | 臂前端 | 4710mm/sec | 5074mm/sec | 6111mm/sec |
| Z | 1250mm/sec | 1111mm/sec | ||
| T | 1875deg/sec | 2000deg/sec | ||
| 重复定位精度 (工具安装面中心)(*3) |
J1+J2 | ±0.02mm | ||
| Z | ±0.02mm | ±0.01mm | ||
| T | ±0.01° | |||
| 最大输入压力(向下,1秒以下) | 90N(1秒以下) | 100N(1秒以下) | ||
| 最大容许惯性力矩(惯性) | 0.075kgm2 | 0.01kgm2 | ||
| 位置检测方式 | 绝对编码器 | / | / | |
| 驱动电机/制动器 | 全轴AC伺服电机/Z轴带制动器 | |||
| 用户空气配管 | 3系统(φ4×2, φ6×1) | 3系统(φ4×1, φ6×2) | ||
| 用户信号线 | 15芯(接近传感器等的信号线) | |||
| 空气源 | 常用压力 | 0.05~0.35MPa | ||
| 最大容许压力 | 0.6MPa | |||
| 质量 | 约16kg | 约20kg | ||